portfolio
Portable Diagnostic Device for Traumatic Brain Injuries
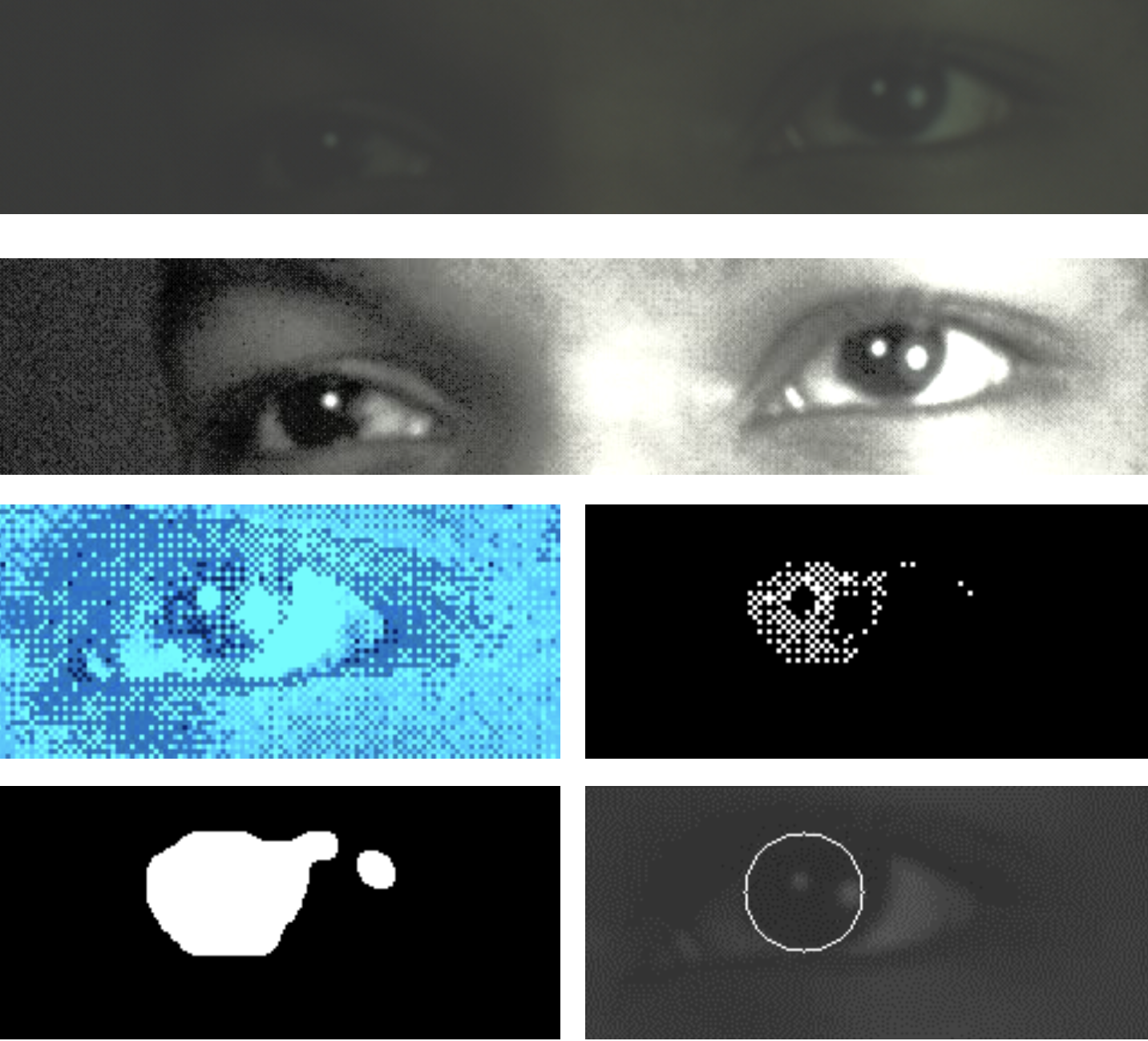
Developed a cost-effective, portable diagnostic device for traumatic brain injuries (TBI) using a Raspberry Pi and its camera. Traditional TBI diagnosis methods, prone to errors and costly, rely on manual eye tests. My device detects saccadic eye movements, indicative of TBI, at 300 frames per second. The process includes the subject focusing on a screen while the device captures, enhances, and processes eye movement data. This data is then analyzed against reference points to identify abnormalities. This project provides an accessible and user-friendly alternative to current diagnostic methods.
Currency Pair Annalysis for Volitility and White Noice
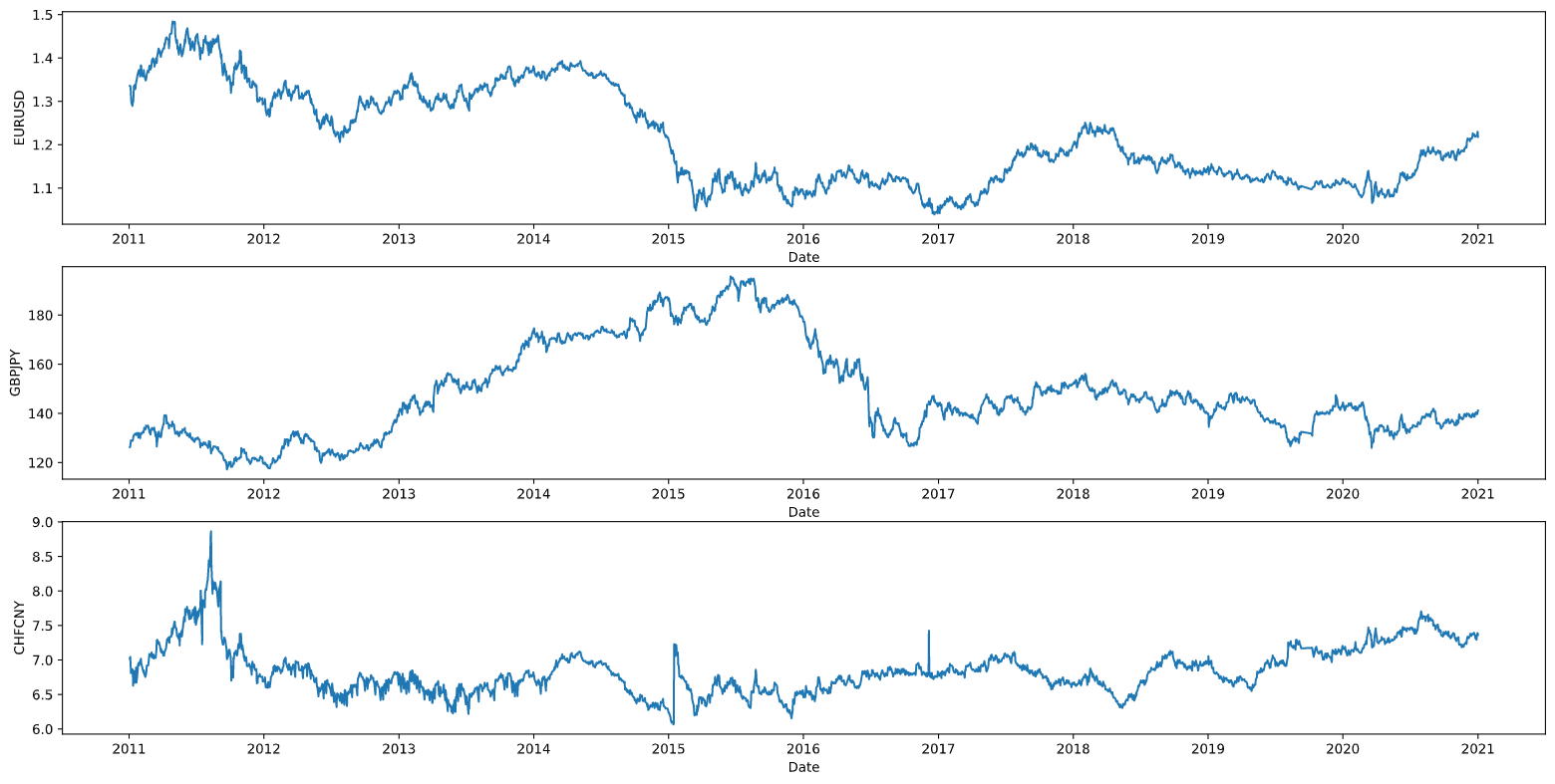
The evaluation of currency pair time series data involves analyzing historical price movements of two different currencies in a forex market over a specific period of time. The primary objective is to discern patterns in volatility and identify instances of white noise within the data. Understanding these trends is crucial for analyzing the currency exchange market, where factors like demand and supply, purchasing power parity, and covered interest rate parity influence the exchange rates of currencies.
decentralized cooperative robotic control
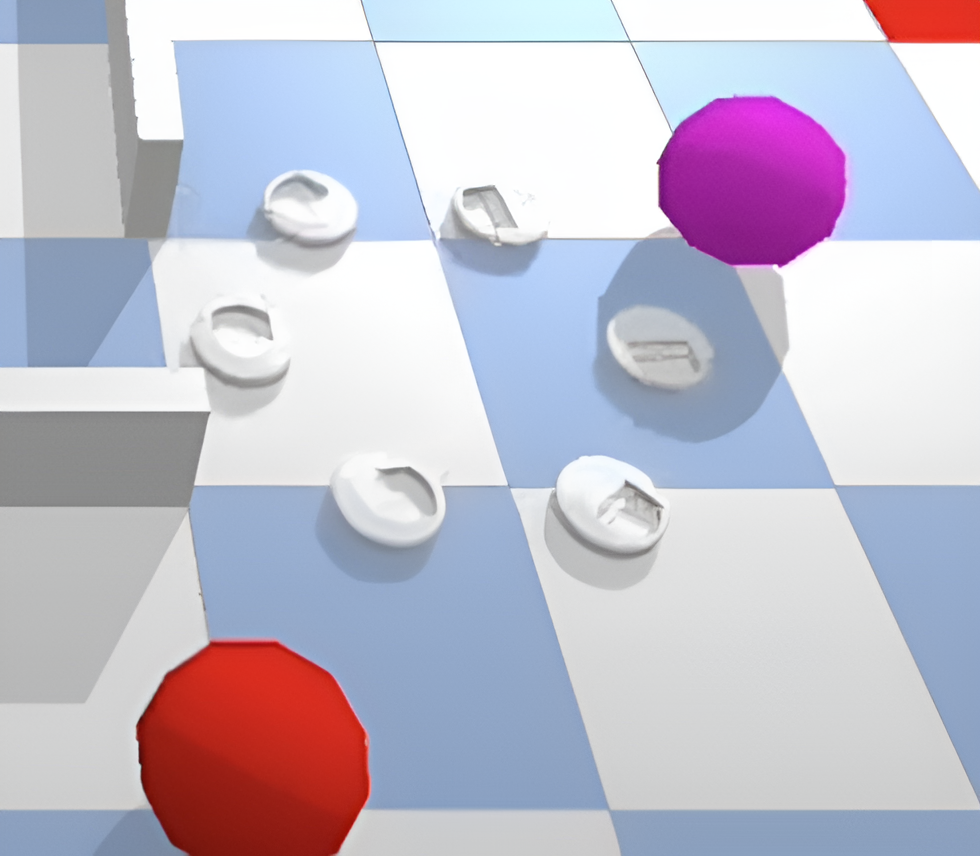
The project focuses on developing decentralized algorithms for networked robotics systems, specifically for cooperative control and swarming tasks. The methodology employs a relative state-based controller using formation control laws to achieve specific formations and tasks. The theory behind the project involves creating a complete graph for communication between robots and using a consensus algorithm to achieve desired formations such as squares, circles, and diamonds. Each formation is dictated by specific reference positions and controlled by gains and matrices (Laplacian, Incidence). Implementation includes iterating through control laws to move robots into various formations, avoid obstacles, and manipulate objects (balls) by caging and moving them securely. This structured approach ensures that the robots can perform complex tasks collaboratively and efficiently in a predefined environment.
VideoKeywords : Python, Graph Theory, Lapunov Stability
Advanced Control of SCARA Manipulator Using Inverse Dynamics and Trapezoidal Velocity Profiles
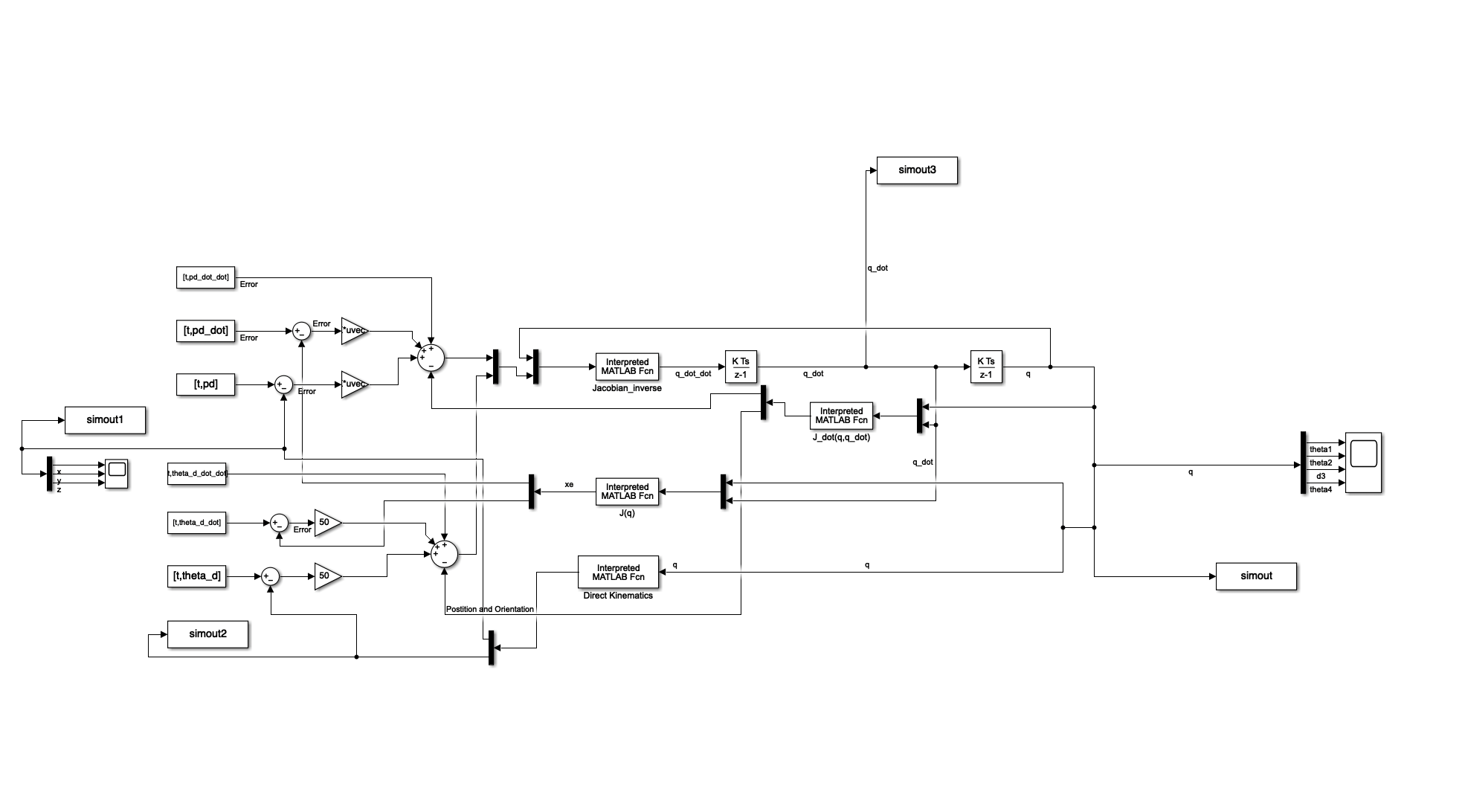
This work involves the control of a SCARA manipulator using inverse dynamics to ensure precise movement. The manipulator's motion follows a trapezoidal velocity profile, which is designed to pass through specified waypoints accurately. To maintain the desired trajectory, we utilize the manipulator’s configuration redundancy, allowing for optimal path planning and execution. Additionally, a second-order inverse kinematics algorithm is employed to solve for joint positions, velocities, and accelerations, ensuring smooth and efficient operation. This method combines advanced control techniques to achieve high-performance manipulation, making it suitable for complex tasks requiring precise and reliable robotic movements.
Keywords: Matlab, Simulink, Inverse Dynamic Control, Trajectory Generation
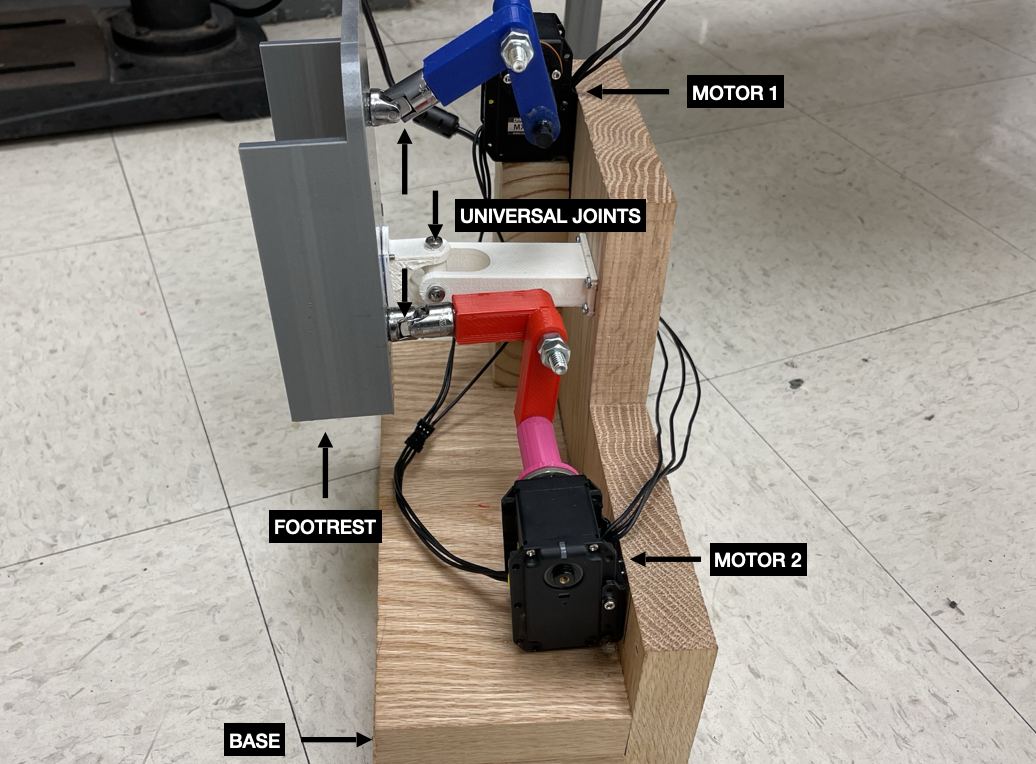
Portable Mechatronic Ankle Rehabilitator with Multi-Mode Operation and Remote Monitoring
Designed and prototyped a mechatronic ankle rehabilitator featuring a portable, low-cost motorized footrest with multiple operational modes and remote monitoring capabilities. The footrest includes two degrees of freedom (DOF) to support the recovery of four ankle movements: plantarflexion, dorsiflexion, inversion, and eversion. High-quality motors were selected based on normative torque and range of motion values for each DOF. Motion control algorithms ensure safe operation. The rehabilitator offers three operational modes to accommodate different stages of recovery: Passive Rehabilitation: The footrest follows a predefined angular position and velocity trajectory, providing external assistance for repetitive ankle motion in the early stages of rehabilitation. User-Controlled Movement: Users can control the footrest using a joystick, facilitating dorsiflexion and plantarflexion with up and down movements, and inversion and eversion with left and right movements. Resistive Training: A force sensor pad integrated into the footrest monitors the user’s effort and applies a proportional, counteracting force, enhancing muscle strength and control gradually and safely.